KUKA robots and software get students at Rosenheim University of applied sciences up and running in robotics
LBR iiwa solves tasks with a sensitive touch
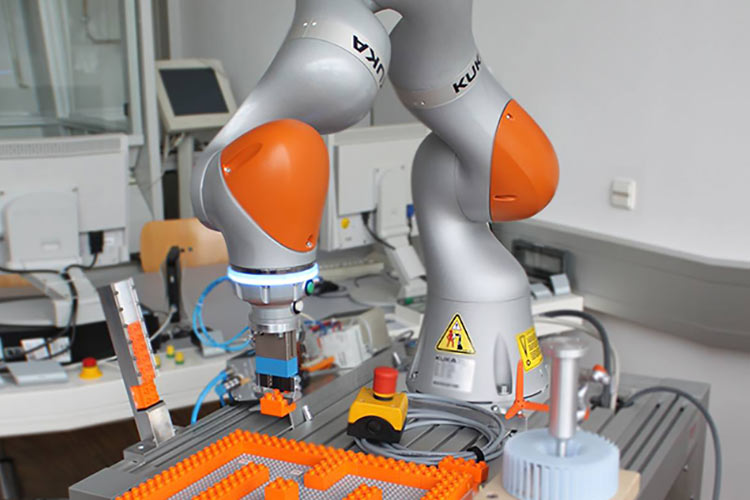
Many engineering careers are no doubt born in early childhood out of a fascination for Lego bricks and robots. The next step up the career ladder then occurs in the assembly and robotics laboratory at Rosenheim University of Applied Sciences under Prof. Dr. Christian Meierlohr. Using an application with the LBR iiwa from KUKA, engineering students no longer stack Lego bricks themselves. Instead, they leave this task to the sensitive seven-axis lightweight robot. The LBR iiwa picks up the pieces, stacks them and sensitively pushes them together. Lego mazes can be created in this way and the sensitive lightweight robot passes through them with its gripper. The students make use here of the robot’s sensitive ability to detect and avoid obstacles and collisions in order to find its way out of the labyrinth. Since the robot is mounted on a specially manufactured laboratory trolley, it can be moved freely around the room and thus flexibly used in other teaching events.
Handling workpieces with a KUKA small robot
The KR AGILUS sixx small robot is extremely fast. It is located in a training cell with a transparent table, automatic workpiece supply by vibratory feeder and an image processing system for workpiece recognition. Depending on the study level – Bachelor or Master – it can be used to accomplish different tasks. Pick-and-place is a typical automation scenario. Here the robot is used to grip workpieces and position them accurately. The image processing system can also be used to recognize and sort different parts. Another task is programming the robot to find its way through a foam labyrinth.
Programming by means of software simulation
As far as programming is concerned, students can use the simulation software KUKA.Sim Pro to program robots offline on the PC and test the sequence with KUKA.OfficeLite In this way, they learn to create motion sequences that can be used, for example, in robotic cells for production and assembly. Following the simulated tests, the sequences programmed offline can be checked directly on the real machine and optimized under practical conditions. “Simulation is a good first step when planning what can be done with a robot, but sooner or later it reaches its limits. The real world behaves slightly differently from the simulated world in certain respects. That is why the ability to transfer the planning on the computer directly to the real robot and apply it there is so valuable,” says Prof. Dr. Meierlohr. Moreover, the integration of the simulation workstations makes it possible to divide the students into smaller groups that can work at multiple stations. This increases the intensity and success of the learning process. In this way, the students can work through the typical engineering tasks from planning through to real implementation.
